I. COMPETITION
INFORMATION
I.1 TEAM ENTRIES
Teams may be comprised of undergraduate and
graduate students, and must be supervised by at least one faculty
advisor. Interdisciplinary teams are encouraged (EE, ME,
CS, etc.). Students must staff each team. Only the student component
of each team will be eligible for the awards. Faculty supervisor will certify
that all team members are bonafide students on application form and will also
provide contact information (telephone number and e-mail address) for him and
the student team leader on the form. Business/Non-Engineering students
are encouraged to join teams to promote marketing, sponsorships, and other
program management functions. For a
student to be eligible to compete as a team member, they are required to have
attended at least one semester of school as a registered student between June
2010 and June 2011.
Team sponsors are
encouraged. Sponsors' participation will be limited to hardware donation
and/or funding support. Sponsors logos may be placed on the vehicle and
may be displayed inside of the team maintenance area. Teams should
encourage sponsor attendance at the IGVC.
Schools are encouraged to
have more than one entry; but are limited to a maximum of three per school, and
each vehicle must have a separate team of students and a distinct design
report. Each entry must be based on a
different chassis and software and must be documented by a separate application
form and design report, submitted in accordance with all deadlines. All entries must have a team name and each
application form must be TYPED
and accompanied with a $250.00 non-refundable registration fee made payable to Oakland University.
Intention to compete must be received no later than February 28, 2011, by mailing your application form to:
Gerald C. Lane
C/O Dr. Ka C. Cheok
102G SEB
SECS-ESE Dept.
Oakland
University
Rochester,
MI 48309-4478
If you
have any questions, please contact Bernard Theisen by telephone at (586) 282-8750,
fax: (586) 282-8684 or e-mail: bernard.theisen@us.army.mil.
I.2 VEHICLE CONFIGURATION
The competition is designed for a small
semi-rugged outdoor vehicle. Vehicle
chassis can be fabricated from scratch or commercially bought. Entries must conform to the following
specifications:
·
Design: Must
be a ground vehicle (propelled by direct mechanical contact to the ground such
as wheels, tracks, pods, etc or hovercraft).
·
Length:
Minimum length three feet, maximum length seven feet.
·
Width:
Minimum width two feet, maximum width five feet.
·
Height: Not
to exceed 6 feet (excluding emergency stop antenna).
·
Propulsion: Vehicle power must be generated onboard. Fuel storage or running of internal
combustion engines and fuel cells are not permitted in the team maintenance
area (tent/building).
·
Speed: There will be a minimum speed of one mile per
hour (1 mph) and a maximum vehicle speed of ten miles per hour (10 mph) that
will be enforced. All vehicles must be
hardware governed not to exceed this maximum speed. Speed will be checked at the end of the
challenge to make sure one mph was averaged through the course. No changes to maximum speed control hardware
are allowed after the vehicle passes Qualification.
·
Mechanical E-stop location: The E-stop button must be a push to stop, red
in color and a minimum of one inch in diameter.
It must be easy to identify and activate safely, even if the
vehicle is moving. It must be located in the center rear of vehicle
at least two feet from ground, not to exceed four feet above ground. Vehicle E-stops must be
hardware based and not controlled through software. Activating the E-Stop must bring the vehicle
to a quick and complete stop.
·
Wireless
E-Stop: The wireless E-Stop
must be effective for a minimum of 50 feet.
Vehicle E-stops must be hardware based and not controlled through
software. Activating the E-Stop must
bring the vehicle to a quick and complete stop.
During the competition performance events (Autonomous Challenge and
Navigation Challenge) the wireless E-stop will be held by the Judges.
·
Safety
Light: The vehicle must have
an easily viewed solid indicator light which is turned on whenever the vehicle
power is turned on. The light must go
from solid to flashing whenever the vehicle is in autonomous mode. As soon as the vehicle comes out of
autonomous mode the light needs to go back to solid.
·
Payload:
Each vehicle will be required to carry a 20-pound payload. The shape and size
is approximately that of an 18" x 8" x 8" cinder block. Refer to
section I.3 Payload.
·
Apriori Data:
The intent is to compete without apriori or memorized data. Course position data should not be
mapped/stored. This is difficult to
enforce, each team is expected to comply with the intent. Both the Autonomous Challenge and Navigation
Challenge courses will be changed after each heat and between runs to negate
any memorization or course familiarization techniques.
I.3 Payload
The
payload must be securely mounted on the vehicle. If the payload falls off the vehicle during a
run, the run will be terminated. The
payload specifications are as follows: 18
inches long, 8 inches wide, 8 inches high and a weight of 20 pounds.
I.4 QUALIFICATION
All vehicles must pass Qualification
to receive standard award money in the Design Competition and compete in the
performance events (Autonomous Challenge and Navigation Challenge). To complete Qualification the vehicle must
pass/perform all of the following criteria.
- Length: The vehicle will be measured to ensure
that it is over the minimum of three feet long and under the maximum of seven
feet long.
- Width: The vehicle
will be measured to ensure that it is over the minimum of two feet wide
and under the maximum of five feet wide.
- Height: The vehicle
will be measured to ensure that it does not to exceed six feet high; this excludes
emergency stop antennas.
- Mechanical E-stop: The mechanical E-stop will be checked for
location to ensure it is located on the center rear of vehicle a minimum
of two feet high and a maximum of four feet high and for functionality.
- Wireless E-Stop: The wireless E-Stop will be checked to
ensure that it is effective for a minimum of 50 feet. During the performance events the
wireless E-stop will be held by the Judges.
- Safety Light: The safety light will be checked to
ensure that when the vehicle is powered up the light is on and solid and
when the vehicle is running in autonomous mode, the light goes from solid
it to flashing, then from flashing to solid when the vehicle comes out of
autonomous mode.
- Speed: The vehicle will have to drive over a
prescribed distance where its minimum and maximum speeds will be
determined. The vehicle must not
drop below the minimum of one mile per hour and not exceed the maximum
speed of ten miles per hour. Minimum speed of one mph will be assessed in
the fully autonomous mode and verified over a 100 foot distance between
the lanes and avoiding obstacles. No
change to maximum speed control hardware is allowed after
qualification. If the vehicle completes
a performance event at a speed faster then the one it passed Qualification
at, that run will not be counted.
- Lane Following: The vehicle must demonstrate that it can
detect and follow lanes.
- Obstacle Avoidance: The vehicle must demonstrate that it can
detect and avoid obstacles.
- Waypoint Navigation: Vehicle must
prove it can find a path to a single two meter navigation waypoint by
navigating around an obstacle.
During the Qualification the
vehicle must be put in autonomous mode to verify the mechanical and wireless
E-stops and to verify minimum speed, lane following and obstacle
avoidance. The vehicle software can be
reconfigured for waypoint navigation qualification. For the max speed run the vehicle may be in
autonomous mode or joystick/remote controlled.
Judges
will not qualify vehicles that fail to meet these requirements. Teams may fine tune their vehicles and
resubmit for Qualification. There
is no penalty for not qualifying the first time. Vehicles that are judged to
be unsafe will not be allowed to compete.
In
the event of any conflict, the judges’ decision will be final.
I.5 INDEMNIFICATION
AND INSURANCE
Teams will be
required to sign an application form prior to February 28, 2011.
Along with the application form, there will be a Waivers of Claims that
will need to be signed by each individual who will be participating at the
competition.
Additionally, the Team's sponsoring
institution will also be required to supply AUVSI with a Certificate of
Insurance at the time the Application Form is submitted. The certificate is to
show commercial general liability coverage in an amount not less than $1
million.
NOTE: The IGVC Committee and Officials will try to adhere to
the above official competition details, rules and format as much as possible.
However, it reserves the right to change or modify the competition where deemed
necessary for preserving fairness of the competition. Modifications, if any,
will be announced prior to the competition as early as possible.
II AUTONOMOUS CHALLENGE COMPETITION
All teams must pass Qualification to participate in this event.
II.1 OBJECTIVE
A fully autonomous unmanned ground robotic
vehicle must negotiate around an outdoor obstacle course under a prescribed
time while maintain a minimum of speed of one mph and a maximum speed limit of ten
mph, remaining with-in the lane, negotiating flags and avoiding the obstacles
on the course.
Judges will rank the entries that complete
the course based on shortest adjusted time taken. In the event that a vehicle
does not finish the course, the judges will rank the entry based on longest
adjusted distance traveled. Adjusted
time and distance are the net scores given by judges after taking penalties,
incurred from obstacle collisions and boundary crossings, into consideration.
II.2 VEHICLE CONTROL
Vehicles must be unmanned and autonomous.
They must compete based on their ability to perceive the course environment and
avoid obstacles. Vehicles cannot be remotely controlled by a human
operator during competition. All computational power, sensing and control
equipment must be carried on board the vehicle.
There will be no base stations allowed for position accuracy
allowed. Teams are encouraged to map the
course and use that information to improve their performance on the course.
II.3
OBSTACLE COURSE
The course will be laid out on grass over an
area of approximately 100 meters long by 100 meters wide and be 2,000 feet in
length. This distance is identified so
teams can set their maximum speed to complete the course pending no prior
violations resulting in run termination.
Track width will vary from ten to twenty feet wide with a turning radius
not less than five feet.
The course outer boundaries will be
designated by continuous or dashed white lane markers (lines) approximately
three inches wide, painted on the ground. Track width will be
approximately ten feet wide with a turning radius not less than five feet. Alternating side-to-side dashes will be 15-20
feet long, with 10-15 feet separation. A
minimum speed will be required of one mph and will be a requirement of
Qualification and verified in each run of the Autonomous Challenge. If the vehicle is not average one mph for the
first 100 feet from the starting line, the vehicle run will be ended. The vehicle will then need to average over
one mph to complete the course within the five minute time line.
Competitors should expect natural or
artificial inclines with gradients not to exceed 15% and randomly placed
obstacles along the course. The course
will become more difficult to navigate autonomously as vehicle progresses. Obstacles on the course will consist of
various colors (white, orange, brown, green, black, etc.) of construction drums
that are used on roadways and highways.
Natural obstacles such as trees or shrubs and manmade obstacles such as
light posts or street signs could also appear on the course. The placement of the obstacles may be
randomized from left, right, and center placements prior to every run.
There will be a minimum of six feet
clearance, minimum passage width, between the line and the obstacles, i.e. if
the obstacle is in the middle of the course then on either side of the obstacle
will be six feet of driving space. Or if the obstacle is closer to one side of
the lane then the other side of the obstacle must have at least six feet of
driving space for the vehicles. Also on
the course there will be complex barrel arrangements with switchbacks and
center islands. These will be adjusted for location between runs. Direction of the obstacle course will not
change between heats.
Alternating red (right) flags and green
(left) flags will be placed on the later part of the course. Flags will have a minimum passage width
between them of six feet, i.e. if the flag is near the edge of the course then
between the flag and the line will be six feet of driving space. Flags are not obstacles and vehicles can
touch flags to increase speed and optimized route, vehicles are not allowed to
go over flags. The objective is for the vehicle to stay to the right of the red
flags and to the left of the green flags.
Flags can be staggered or the vehicle could be driving through a set of
flags.
Practice Autonomous Map
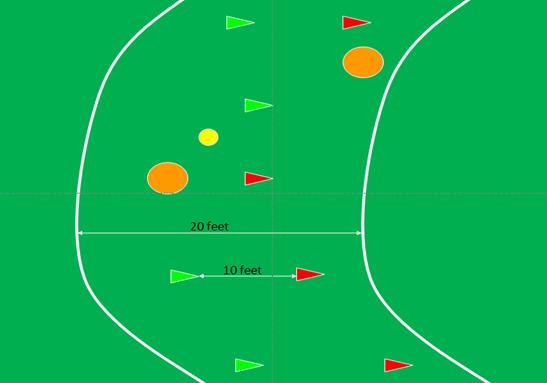
Flag Configurations Map
Autonomous Challenge will contain eight Global
Positioning System (GPS) waypoints, one in each corner (four total) and one at
each intersection opening (four total).
At the intersection openings, vehicles will need to use the waypoints to
get from point A to point B. In the
Autonomous Course figure above, the two pair of navigation waypoints the team
will use to go point to point either 2 to 3 or 4 to 1. The open space between the navigation
waypoints will contain a mix of obstacles which must be avoided while staying
with-in the course.
Teams will have to choose how they want to
run the course; there will be two paths that are the same distance in length
and difficulty. Teams can choose always
to run the same path, or run any combination of the two paths. Examples of the paths would be start and go
from point 6-2-3-8-7 or start and go from point 6-5-4-1-7. Teams do not have to cross through the actual
points, they are there to assist and use as the team seem fit.
II.4 COMPETITION PROCEDURES
- The competition
will take place in the event of light rain or drizzle but not in heavy
rain or lightning.
- Each qualified
team will have the up to two runs (time permitting) in each of three
heats.
- Judges/officials
will assign a designated starting order. Teams will setup on-deck in that
order. Failure to be on-deck will place you at the end of the order for
the run and may forfeit you final (second) run in a heat based on heat
time completion.
- No
team participant is allowed on the course before the team’s first run, and
only one team member is allowed on the course during a run. This
shall in no case be the faculty advisor.
- At the
designated on-deck time, the competing team will be asked to prepare their
vehicle for an attempt. On-deck teams start in the order they arrive in
the starting area unless they give way to another team.
- The Starting
Official will call teams to the starting line. The Starting Officials’ direction is
final; the Starting Official may alter the order to enhance the
competition flow of entries (e.g. slower vehicles may be grouped together
to allow the running of two vehicles on the course simultaneously).
- A team will have
one minute in the starting point to prep the vehicle for the judge to
start the vehicle.
- The judge will
start the vehicle by a one touch motion; i.e. hitting the enter key of a
keyboard, a left mouse click, lifting the e-stop up, flipping a toggle
switch, etc.
- An attempt will
be declared valid when a designated judge gives the start signal at the
designated competing time. An attempt will continue until one of the
following occurs:
- The vehicle
finishes the course.
- The vehicle was
E-Stopped by a judge’s call.
- The team
E-Stops the vehicle.
- Five minutes
have passed after the vehicle run has started.
- The vehicle has
not started after one minute after moving to the start line or at the
judges’ discretion.
- Teams will
ready the vehicle for start and advice the IGVC Judge to push one button
to start the vehicle, the vehicle must be ready for a judges start
command in one minute.
- An official
will carry the E-Stop.
- Time for each
heat will be strictly observed.
- Tactile sensors
will not be allowed.
- Each
vehicle will be given 5 minutes per attempt to complete the course, if the
vehicle has not completed the course in the 5 minute time period, it will
ended by a judge’s choice E-stop, with no penalty assigned for that run.
- Each
vehicle must navigate the course by remaining inside the course
boundaries and navigating around course obstacles. For the following Traffic Violations, the
appropriate ticket will be issued and deducted from the overall distance
or time score. Refer to section
II.5 Traffic Violation Laws.
II.5 Practice Course
All teams that have qualified will
be given six tokens. Each token
represent one opportunity to use the Autonomous Challenge Practice Course. The course will be open daily for use from
the time a team Qualifies till the start of the third heat of the Autonomous
Challenge. The course will be run like
the Autonomous Challenge with the same rules and similar obstacles. One token allows a maximum of six minutes
(one minute at the start point and five minutes for the run) on the Autonomous
Challenge Practice Course. In that time
you must position your vehicle at the start, prep the vehicle for the judge to
start, and can continue to run as long as you do not break any of the rules of
the Autonomous Challenge. If so, your
run and remaining time will be ended.
All teams will still have unlimited access to the regular practice
fields.
II.6 Traffic
Violation Laws
|
|
Traffic Violations
|
Ticket Value
|
E-Stop
|
Measurement
|
|
1
|
Hold-up
Traffic
|
End of Run
|
Yes
|
Time to 100 feet
|
|
2
|
Leave the Course/Scene
|
-
10 Feet
|
Yes
|
Yes
|
|
3
|
Crash/Obstacle Displacement
|
-
10 Feet
|
Yes
|
Yes
|
|
4
|
Careless Driving
|
-
5 Feet
|
No
|
No
|
|
5
|
Sideswipe/Obstacle Touch
|
-
5 Feet
|
No
|
No
|
|
6
|
Student's Choice E-Stop
|
-
5 Feet
|
Yes
|
Yes
|
|
7
|
Judge's Choice E-Stop
|
0
Feet
|
Yes
|
Yes
|
|
8
|
Blocking Traffic
|
-
5 Feet
|
Yes
|
Yes
|
|
9
|
Loss of Payload
|
0
Feet
|
Yes
|
Yes
|
|
10
|
Wrong Side of Flag
|
-5
Feet
|
No
|
No
|
|
11
|
Run over Flag
|
-10
Feet
|
Yes
|
Yes
|
|
12
|
Too slow, did
not go 1 mph
|
-100
Feet
|
No
|
Yes
|
- Hold-up traffic: Must maintain 1
mph, there will be a speed check at 100 foot mark of the course, will
result in end of run with time recorded
- Leave
the scene\course: All portions of the vehicle cross the
boundary. The overall distance will
be measured from the starting line to the furthest point where the final
part of the vehicle crossed the boundary outside edge.
- Crash: The overall
distance will be measured from the starting line to the collision point
with the obstacle.
- Careless
Driving:
Crossing the boundary while at least some part of the vehicle remains in
bounds.
- Student
E-Stop:
Student e-stop is used if the team
feels that there may be damaged caused to their vehicle or they know that
it is stuck and want to end their time.
- Judge
E-Stop:
The overall distance will be measured from the starting line to the front
of the vehicle or where the final/furthest remaining part of vehicle if
stopped, crossed the boundary outside edge.
- Obstacle
Displacement:
Defined as displacing permanently the obstacle from its original position.
Rocking/Tilting an obstacle with no permanent displacement is not
considered obstacle displacement.
- Blocking
Traffic:
Vehicles stopping on course for over one minute will be stopped and
measured.
- Loss
of Payload:
If the payload falls of the vehicle the run will be ended.
- Wrong
Side of Flag: Vehicles must remain on the left side of red flags and the right
side of green flags.
- Run
over Flag: Vehicles drive over
the top of a red or green flag will results in End of Run.
- Too Slow: If the vehicle
does not maintain 1 mph minimum speed limit throughout the course there
will be a large penalty asset to the vehicle.
II.7 HOW COMPETITION WILL BE JUDGED
- A team of judges
and officials will determine compliance with all rules.
- Designated
competition judges will determine the official times, distances and ticket
deductions of each entry. At the
end of the competition, those vehicles crossing the finish line will be
scored on the time taken to complete the course minus any ticket
deductions. Ticket
values will be assessed in seconds (one foot = one second) if the vehicle
completes the course within the five minute run time.
- The team with
the adjusted shortest time will be declared the winner.
- In the event
that no vehicle completes the course, the score will be based on the
distance traveled by the vehicle minus the ticket deductions. The team with the adjusted longest
distance will be declared the winner.
- For standard award
money consideration, entry must exhibit sufficient degree of autonomous
mobility by passing the money barrel. The money barrel location is determined
by the judges during the final/actual course layout. If a tie is declared between entries, the
award money will be split between them.
II.8 GROUNDS FOR
DISQUALIFICATION
- Judges will
disqualify any vehicle which appears to be a safety hazard or violate the
safety requirements during the competition.
- Intentional
interference with another competitor's vehicle and/or data link will
result in disqualification of the offending contestant's entry.
- Damaging the
course or deliberate movement of the obstacles or running over the
obstacles may result in disqualification.
- Actions designed
to damage or destroy an opponent's vehicle are not in the spirit of the
competition and will result in disqualification of the offending
contestant's entry.
III. DESIGN COMPETITION
All teams must participate in the Design Competition.
III.1 Objective
Although the ability of the vehicles to negotiate the
competition courses is the ultimate measure of product quality, the officials
are also interested in the design strategy and process that engineering teams
follow to produce their vehicles. Design judging will be by a panel of expert
judges and will be conducted separate from and without regard to vehicle
performance on the test course. Judging will be based on a written report, an
oral presentation and examination of the vehicle.
Design
innovation is a primary objective of this competition and will be given special
attention by the judges. Innovation is considered to be a technology (hardware
or software) that has not ever been used by this or any other vehicle in this
competition. The innovation needs to be documented, as an innovation, clearly
in the written report and emphasized in the oral presentation.
III.2 Written Report
The report
should not exceed 15 letter-sized pages, including graphic material and all
appendices, but not including the title page. Reports will lose 5 points in scoring for each
page over 15. Line spacing must be at
least 1.5, with at least a 10 point font (12 is preferred). Each vehicle must have a distinct and complete
report of its own (a report cannot cover more than one vehicle). Participants are required to submit four hard
copies of the report and an electronic copy in PDF format on a CD; failure to
submit either of these will result in disqualification. All reports, both for new vehicles and for
earlier vehicles with design changes, must include a statement signed by the
faculty advisor certifying that the design and engineering of the vehicle
(original or changes) by the current student team has been significant and
equivalent to what might be awarded credit in a senior design course. The
certification should also include a brief description of the areas in which changes
have been made to a vehicle from a previous year. Everything must be mailed so
as to arrive by May 10, 2011, addressed to:
Bernard
Theisen
21281
Curie Avenue
Warren,
MI 48091-4316
Written reports arriving after that date will lose 10 points in
scoring for each business day late, electronic copies arriving after that date
will lose 5 points in scoring for each business day late. Teams are encouraged
to submit reports even several weeks early to avoid the last minute rush of
preparing vehicles for the competition, and there will be no penalty for last
minute changes in the vehicle from the design reported. The electronic copy of the report will be
posted on the competition's web site in PDF format after the completion of the
competition.
The paper should present the conceptual design of the vehicle
and its components. Especially important to highlight are any unique innovative
aspects of the design and the intelligence aspects of the vehicle. Also
included must be descriptions of:
|
electronics
|
design planning
process
|
|
electrical system
|
signal processing
|
|
actuators
|
plan for path
following
|
|
software strategy
|
(both solid &
dashed lines)
|
|
sensors
|
plan for control
decisions
|
|
computers
|
system integration
plan
|
|
mapping
|
high speed
operations
|
Design
of the lane following and obstacle detection/avoidance systems must be
specifically described. Along with how
the vehicle uses mapping techniques to perceive and navigate through its
environment. Describe how the system uses
GPS for waypoint navigation and localization.
Components acquired
ready-made must be identified, but their internal components need not be
described in detail. The steps followed
during the design process should be described along with any use of
Computer-Aided Design (CAD). How
considerations of safety, reliability, and durability were addressed in the
design process should be specifically described, as well as problems
encountered in the design process and how they were overcome. The analysis leading to the predicted
performance of the vehicle should be documented, specifically:
·
Speed
·
Ramp
climbing ability
·
Reaction
times
·
Battery
life
·
Distance
at which obstacles are detected
·
How
the vehicle deals with complex obstacles including switchbacks and center
islands dead ends, traps, and potholes
·
Accuracy
of arrival at navigation waypoints
·
Comparison
of these predictions with actual trial data is desirable.
Although cost itself
is not a factor in judging (these are considered research vehicles), the report
should include a cost estimate (not counting student labor) for the final
product if it were to be duplicated. A breakdown of the cost by component is helpful.
The
team organization and the names of all members of the design team, with
academic department and class, should be included along with an estimate of the
project's total number of person-hours expended.
Vehicles
that have been entered in IGVC in earlier years and have not had significant
changes in design are ineligible in either the design or performance events.
Vehicles that have been changed significantly in design (hardware or software)
from an earlier year are eligible, but will require a completely new design
report (15 pages or less) treating both the old and new features, thus
describing the complete vehicle as if it were all new.
|
Judges will score
the written reports as follows:
|
Maximum Points
|
|
1. Conduct of the design process and team
organization
(including decision-making & software development)
|
50
|
|
2. Completeness of
the documentation
|
50
|
|
3. Quality of
documentation (English, grammar, and style)
|
50
|
|
4. Effective
innovation represented in the design (as described above)
|
150
|
|
5. Description of
mapping technique
|
100
|
|
6. Description of
electronic design
|
100
|
|
7. Description of
software strategy
|
150
|
|
8. Description of
systems integration
Descriptions to include: lane following,
obstacle detection/
avoidance, and waypoint navigation
(GPS or other)
|
150
|
|
9. Efficient use of
power and materials
|
50
|
|
10. Attention given
to safety, reliability, and durability
|
50
|
|
Total
|
900
|
III.3 Oral Presentation
The
technical talk should relate the highlights of the written report described
above and include any updates of the design since the written report. Audio or
video tape presentations of the text are not allowed, but graphic aids may be
presented by video, slide projection, computer projection, overhead
transparencies, or easel charts. The presentation must be made by one or more
student members of the team to the judges and other interested members of the
audience and should last not more than 10 minutes. A penalty of 5 points will
be assessed for each minute or fraction thereof over 11 minutes. After the
presentation, judges only may ask questions for up to 5 minutes. The audience
should be considered as a senior management group of generally knowledgeable
engineers upon whom the project is dependent for funding and the team is
dependent for their employment. Scoring will be as follows:
|
Judges
will score the oral presentations as follows:
|
Maximum Points
|
|
1.Clear and
understandable explanation of the innovations
|
50
|
|
2. Logical
organization of the talk
|
25
|
|
3. Effective use of
graphic aids
|
25
|
|
4. Articulation
|
20
|
|
5. Demonstrated
simulation of vehicle control in performance events
|
10
|
|
6. Response to
questions
|
10
|
|
7. Salesmanship
|
10
|
|
Total
|
150
|
Effective
use of graphic aids includes not blocking the view of the screen by the
presenter and simple enough graphics that are large enough to read (block
diagrams rather than detailed circuit diagrams). Articulation refers to the
clarity and loudness of speaking. Response to questions means short answers
that address only the question. Salesmanship refers to the enthusiasm and pride
exhibited (why this vehicle is the best).
Participants are responsible for providing
their own visual aids and related equipment (the vehicle itself may be
displayed). A computer-connected projector will be made available. Projectors
may also be supplied by the participants.
During the oral
presentation, the following question period and the examination of the vehicle,
team members sitting the audience may participate by assisting the oral
presenters, but at no time is the faculty advisor to participate in this part
of the design competition.
III.4 Examination of the
Vehicle
The
vehicle must be present and will be examined by the judges preferably
immediately after the oral presentation or at another convenient time the time
during the competition. Software is not included in this judging. Judging will
be as follows:
|
Judges will score the vehicle examinations
as follows:
|
Maximum Points
|
|
1. Packaging
neatness, efficient use of space
|
20
|
|
2. Serviceability
|
20
|
|
3. Ruggedness
|
20
|
|
4. Safety
|
20
|
|
5. Degree of
original content in the vehicle (as opposed to ready-made)
|
50
|
|
6. Style (overall appearance)
|
20
|
|
Total
|
150
|
III.5 Final Scoring
The number of points awarded by the individual judges will be
averaged for each of the 23 judging areas above, and these results will be
offered to each participating team for their edification. The total of the
average scores over all 23 areas (max 1200) will be used to determine the
ranking.
When two teams of judges are used (due to a large number of
entries) each judging team will determine the top three winners in their group,
and the resulting six contestants will participate in a runoff of oral
presentations and vehicle examinations judged by all judges to determine an
overall Design Winner. The six teams will be judged in random order.
For the Finals competition
three criteria from the written report judging will be added to the normal oral
presentation scoring shown above for preliminary judging. Thus, the
Finals Oral presentation scoring will have maximum points as below:
|
Judges will score the final
presentations as follows:
|
Maximum Points
|
|
1.Clear explanation of the innovations
|
50
|
|
2. Description of mapping technique
|
30
|
|
3. Description of Electronic
Design
|
30
|
|
4. Description of Software
Strategy
|
30
|
|
5. Description of System
Integration
|
30
|
|
6. Logical organization of
the talk
|
50
|
|
7. Effective use of graphic
aids
|
25
|
|
8. Articulation
|
25
|
|
9. Demonstrated Simulation of
Vehicle Control
|
10
|
|
10. Response to questions
|
10
|
|
11. Salesmanship
|
10
|
|
Total
|
300
|
The vehicle examination
scoring will be the same as in the preliminary judging, as shown above.
IV. NAVIGATION CHALLENGE
All teams must pass Qualification to participate in this event.
IV.1 Objective
Navigation
is a practice that is thousands of years old. It is used on land by
hikers and soldiers, on the sea by sailors, and in the air by pilots.
Procedures have continuously improved from line-of-sight to moss on trees to
dead reckoning to celestial observation to use of the GPS. The challenge
in this event is for a vehicle to autonomously travel from a starting point to
a number of target destinations (waypoints or landmarks) and return to home
base, given only the coordinates of the targets in latitude and longitude.
IV.2 On-Board Sensors
It
is expected that most contestants will use Differential GPS, but
non-differential GPS is allowed as well as dead reckoning with compasses,
gyros, and wheel odometers. Vision systems and/or sonar and laser
rangefinders may be used for obstacle detection. There are a number of
handheld GPS systems that connect to laptop computers available on the market
for under $200. Garmin, SkyMap/GPS, and
Magellan are some; Earthmate even has one for Macintosh. These may not be convenient to integrate in
vehicle control programs. However, differential GPS units are available
from Hemisphere GPS, Trimble, Thales, Magellan, Garmin, NovAtel, and Starlink
(and possibly others). Differential correction signals are available in
the Southeast Michigan area from the U.S. Coast Guard. WAAS or any of the commercial suppliers of
corrections are also allowed. The use of
a base station to supplement the on board GPS unit is not permitted.
IV.3 GPS Course
The
map in the figure below shows a typical course for the Navigation
Challenge. This is a practice map for use by teams during development of
their vehicle. Coordinates for the actual navigation course waypoints and the origin will be
given to the contestants on June
4, 2011 in degrees latitude and longitude, but no XY
coordinates will be provided. There will be three 4 meter square start/ finish boxes
(one for each heat) outside the main course in which
teams will set up their vehicles before their run.
The
competition course will be run on grass and will be approximately 50 by 65
meters (roughly 0.8 acre), and the total travel distance on the course will be
on the order of 200 meters depending on the route chosen for the vehicles. The
exact waypoint locations will be marked on the grass for use by the judges, but
there will be no standup markers to indicate those positions. Construction
barrels, barricades, fences, and certain other obstacles will be located on the
course in such positions that they must be circumvented to reach the waypoints.
These may be randomly moved between runs.
The
course will be divided into two areas by a fence with a two meter wide opening
located somewhere along it (no coordinates are provided). The opening will be
randomly relocated along the fence at the start of each run. Waypoints south of
the fence (the Valley) will have four meter diameter circles or squares around
them (visible only to the judges) and waypoints north of the fence (the Mesa)
will have two meter circles around them.
No
team participant is allowed on the course before the team’s first run, and only
one team member is allowed on the course during a run. This shall in no case be the
faculty advisor.
Practice Navigation Map
IV.4 Practice Course
All teams will have access to the
practice navigation course. The
Navigation Challenge Practice Course will have similar obstacles to the ones on
the Navigation Challenge. There will be
a minimum of three practice waypoints on the course for teams to tune their
system to.
IV.5 RUN PROCEDURE AND SCORING
There will be three heats
during the day with start and stop times the same as those in the Autonomous
Challenge. It is intended that each team
will be allowed up to two runs in each heat. There will be three starting boxes, so each
team that manages three runs will start from each of the boxes during the
course of three heats. In a first-come-first-served order teams
should choose any free starting box that they have not been in before, until
they have started in all three. After three runs they will begin the
cycle of boxes again. The trial with the best performance will be used
for scoring. Starting times will be
first-come-first-served within each heat, except that teams up for their first
trial will have priority over those wanting a second trial. It is unlikely that there will be time in the
day for all registered teams to get six tries.
Vehicles will park in
the starting box selected and have up to five minutes or until the course is
clear for final adjustments before starting. Vehicles may seek the waypoints in any order,
and the vehicle actually reaching the most waypoints (counting also the
Start/Finish boxes) in the allotted six minute run time will be the winner. The vehicle must finish in the same box in
which it started. If two or more
vehicles reach the same number of waypoints, the vehicle doing so in the least
time will be declared the leader. If two or more vehicles reach the same number
of waypoints while stopped by the six-minute rule, they will be declared tied
and will share any awards.
If a vehicle (any
part) fails to come within two meters of a target in the southern area of
the course or one meter in the northern area, it will not be judged to have
reached that target. In order to qualify
for standard award money a vehicle must reach at least five waypoints (not
counting the start/finish box).
IV.6 Run Termination
All runs will be
terminated by an E-stop (by the students or the judges) signaled by a judge’s
whistle or bell, either:
- When the vehicle arrives back at the original start/finish
point or enters any start/finish box any time after first starting.
- If
any part of the vehicle leaves the perimeter of the field other than at a
start/finish box.
- If the
vehicle strikes any obstacle.
- If
six minutes have elapsed since the start of the run (200 meters in six
minutes is 1.2 miles
per hour).
- In all cases the
judges' call will be final.
V. JAUS Challenge
Participation in the JAUS Challenge is recommended.
V.1 TECHNICAL OVERVIEW
Each
entry will interface with the Judge’s COP providing information as specified
below. The general approach to the JAUS interface will be to respond to a
periodic status and position requests from the COP. This requires the support
of the JAUS Transport Specification (AS5669A) and the JAUS Core Service Set
(AS5710). The JAUS Transport Specification supports several communication
protocols, the competition will use only the Ethernet based JUDP. The Core
services required for the competition include the discovery, access control,
and management services. The JAUS Mobility Service Set (AS6009) or JSS-Mobility
defines the messaging to be used for position communications and waypoint based
navigation.
V.2 COMMON OPERATING PICTURE
The COP will provide
a high level view of the systems in operation that successfully implement the
JAUS protocol as described above. This software is a simple validation,
reporting and recording tool for the Judges to use while verifying student
implementations of the JAUS standard. It provides a graphical display of the
operational area in relative coordinates. Primitive graphics are loaded in the
display of the COP to add perspective. Each reported status is displayed on the
COP user interface and recorded for future reference. For competitions and
systems reporting positional data, a 2-D map on the COP display is annotated
with the updated position as well as track marks showing the previous position
of the system for the current task.
V.3 COMMUNICATIONS PROTOCOLS
The
teams will implement a wireless 802.11b/g or hardwired Ethernet (RJ-45) data
link. The interface can be implemented at any point in the student team’s
system including the control station or mobility platform.
The
Internet Protocol (IP) address to be used will be provided at the competition.
For planning purposes, this address will be in the range of 192.168.1.100 to
192.168.1.200. The Judge’s COP will have both hard-wire and 802.11b/g
capabilities where the IP address of the COP will be 192.168.1.42. All teams will be provided an IP address to be
used during the competition. The last octet of the IP address is significant,
as it will also be used as the subsystem identifier in the team’s JAUS ID. The
port number for all JAUS traffic shall be 3794.
V.4 JAUS SPECIFIC DATA
The JAUS ID mentioned
above is a critical piece of data used by a JAUS node to route messages to the
correct process or attached device. As indicated above each team will be
provided an IP address in which the last octet will be used in their respective
JAUS ID. A JAUS ID consists of three elements, a Subsystem ID, a Node ID and a
Component ID. The Subsystem ID uniquely identifies a major element that is an
unmanned system, an unmanned system controller or some other entity on a
network with unmanned systems. A Node ID is unique within a subsystem and
identifies a processing element on which JAUS Components can be found. A
Component ID is unique within a Node represents an end-point to and from which
JAUS messages are sent and received. The last octet of the assigned IP address
will be used as the team’s JAUS Subsystem ID. So for the team assigned the IP
address of 192.168.1.155, the completed JAUS ID of the position-reporting
component might be 155-1-1 where the node and component are both assigned the
IDs of 1. This is shown in the IP and JAUS ID Assignment Figure below. The Node
ID and Component ID are discussed further in the JAUS Service Interface
Definition Language standard
(AS5684). The COP software will be programmed with the assumption that all
services required by the specific competition are implemented on a single
component.
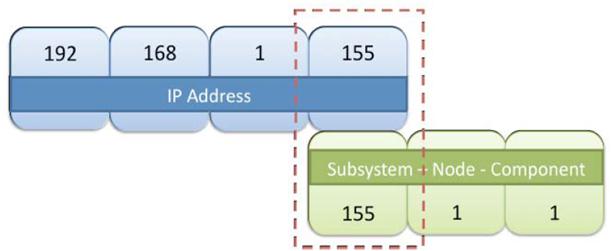
IP and JAUS ID Assignment
In summary, each team
will be assigned an IP address by the judges. The last octet of that IP address
will be the team’s subsystem identifier. The COP will be a subsystem as will
each team’s entry in the competition. The COP will have a JAUS ID of 42:1:1 and
an IP address of 192.168.1.42. The port number shall be 3794.
V.5 COMPETITION TASK DESCRIPTION
Messages
passed between the COP and the team entries will include data as described in
the task descriptions below. The COP will initiate all requests subsequent to
the discovery process described as Task 1. A system management component is
required of all teams. This interface will implement several of the messages
defined by the Management Service defined in the JSS-Core. This service
inherits the Access Control, Events and Transport services also defined by the
JSS-Core document. The implementation of the Access Control interfaces will be
necessary to meet the JAUS Challenge requirements; however no messages from the
Events service will be exercised. The sequence diagram in Discovery and System
Management Figure shows the required transactions for discovery including the
access control setup and system control protocol. This interaction is required
for every task.
The judges will
evaluate each team’s ability to meet the Interoperability Challenge for the
tasks described below in accordance with the scoring chart.
|
Judges will score the task as follows:
|
Maximum Points
|
|
1. Transport Discovery
|
10
|
|
2. Capabilities Discovery
|
10
|
|
3. System Management
|
10
|
|
4. Velocity State Report
|
10
|
|
5. Position and Orientation
Report
|
10
|
|
6. Waypoint Navigation
|
10
|
|
Total
|
60
|
V.6 TRANSPORT DISCOVERY
For
any two elements in the system to communicate meaningful data there must first
be a handshake to ensure both sides use the same protocols and are willing
participants in the interaction. For the
sake of simplicity, the team’s entry shall initiate the discovery protocol with
the Judge’s COP, and the IP address and JAUS ID of the COP shall be fixed. The IP address and JAUS ID of the Judge’s COP
are defined as:
COP IP ADDRESS: 192.168.1.42:3794
COP JAUS ID: 42-1-1
(Subsystem-Node-Component)
The
discovery process, in Discovery and System Management Figure, will occur at the
application layer. The student team’s JAUS element will send a request for
identification to the COP once every 5 seconds. The COP will respond with the
appropriate informative message and request identification in return from the
team’s JAUS interface. After the identification report from the COP, the team
entry will stop repeating the request. This transaction will serve as the basic
discovery between the two elements.
The COP software will
be programmed with the assumption that all services required by the specific
competition are provided at the single JAUS ID. Furthermore, as per the AS5669A
Specification, the team’s entry shall receive JUDP traffic at the same IP
address and port number that initiated the discovery protocol. Teams should
note that this is different from common UDP programming approaches in which the
outbound port for sent messages is not bound.
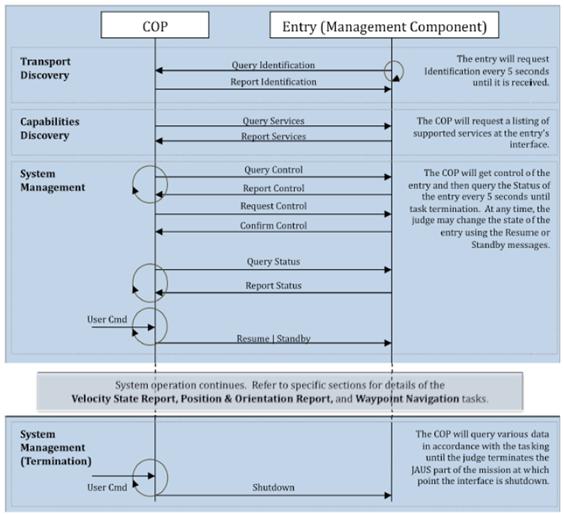
Discovery and System
Management
The following table
shows the messages sent from the COP to the team’s entry, along with the
expected response and minimal required fields to be set using the presence
vector (PV) if applicable, required to complete this portion of the challenge:
|
Input Messages
|
Expected Response
|
Required Fields (PV)
|
|
Query Identification
|
Report Identification
|
N/A
|
V.7 CAPABILITIES DISCOVERY
Following
the completion of the Transport Discovery handshake the COP will query the
entry for its capabilities. The Query Services message and Report Services
message are defined in the AS5710 document and require the inheritance of the
Transport service. The COP will send a Query Services message to a student team
entry. Upon receipt of the message the student team entry shall respond with a
properly formed Report Services message.
The following table
shows the messages sent from the COP to the team’s entry, along with the
expected response and minimal required fields to be set using the presence
vector (PV) if applicable, required to complete this portion of the challenge:
|
Input Messages
|
Expected Response
|
Required Fields (PV)
|
|
Query Identification
|
Report Identification
|
N/A
|
V.8 SYSTEM MANAGEMENT
The implementation of
the status report is required. This interoperability task, like the discovery
tasks above, is also a prerequisite for all other tasks. The task begins with
the discovery handshake as described above and continues for an indeterminate
period of time. The protocol is given in Discovery and System Management
Figure. The following table shows the messages sent from the COP to the team’s
entry, along with the expected response and minimal required fields to be set
using the presence vector (PV) if applicable, required to complete this portion
of the challenge:
|
Input Messages
|
Expected Response
|
Required Fields (PV)
|
|
Query Control
|
Report Control
|
N/A
|
|
Request Control
|
Confirm Control
|
N/A
|
|
Query Status
|
Report Status
|
N/A
|
|
Resume
|
<none>
|
N/A
|
|
Standby
|
<none>
|
N/A
|
|
Shutdown
|
<none>
|
N/A
|
V.9 VELOCITY STATE REPORT
In
the Velocity State Report task the COP will query the entry for its current
velocity state. The COP will send a Query Velocity State message to a student
team entry. Upon receipt of the message the student team entry shall respond
with a properly formed Report Velocity State message.
The following table shows the messages sent
from the COP to the team’s entry, along with the expected response and minimal
required fields to be set using the presence vector (PV) if applicable,
required to complete this portion of the challenge:
|
Input Messages
|
Expected Response
|
Required Fields (PV)
|
|
Query Velocity State
|
Report Velocity State
|
Velocity X, Yaw Rate &
Time Stamp [320 Decimal, 0140h]
|
V.10 POSITION AND ORIENTATION REPORT
For
performing the task Position and Orientation Report, the discovery and status
protocols described above are also required. In addition to the COP queries for status, the
vehicle systems will also be required to respond correctly to local position
queries. The reports will be validated
for relative position and with respect to a relative time offset to ensure the
time contained within each position report is valid with respect to some timer
within the entry’s system. In other words, the position reports must show that
the travel occurred at a reasonable speed and not instantaneously. Additional variation in the position reporting
using the available presence vectors is allowed. Minimally, all entries must report X, Y and
Time Stamp.
The following table
shows the messages sent from the COP to the team’s entry, along with the
expected response and minimal required fields to be set using the presence
vector (PV) if applicable, required to complete this portion of the challenge:
|
Input Messages
|
Expected Response
|
Required Fields (PV)
|
|
Set Local Pose
|
<none>
|
X, Y & Yaw
[67 Decimal, 0043h]
|
|
Query Local Pose
|
Report Local Pose
|
X, Y & Time Stamp
[259 Decimal, 0103h]
|
V.11 WAYPOINT NAVIGATION
The
team entry shall implement the Local Waypoint List Driver service from the JAUS
Mobility Service Set (AS6009). From a starting point in the JAUS challenge test
area the student entry will be commanded to traverse, in order, a series of 4
waypoints. Time will be kept and will start at the moment that the student
entry exits the designated start box. Upon leaving the start box the student
entry will proceed to the first waypoint in the list. Upon satisfactorily
achieving each waypoint the team will be credited with 2.5 points. Time is kept
for each waypoint achieved. The shortest overall time taken to achieve this
task will determine the winner in the event of a tie.
The following table
shows the messages sent from the COP to the team’s entry, along with the
expected response and minimal required fields to be set using the presence
vector (PV) if applicable, required to complete this portion of the challenge:
|
Input Messages
|
Expected Response
|
Required Fields (PV)
|
|
Set Element
|
Confirm Element Request
|
N/A
|
|
Query Element List
|
Report Element List
|
N/A
|
|
Query Element Count
|
Report Element Count
|
N/A
|
|
Execute List
|
<none>
|
N/Speed (value of 1)
|
|
Query Active Element
|
Report Active Element
|
N/A
|
|
Query Travel
|
Report Travel Speed
|
N/A
|
|
Query Local Waypoint
|
Report Local Waypoint
|
X & Y (value of 3)
|
VI. AWARDS AND RECOGNITION
All schools are only eligible to win award money once per event (Autonomous Challenge,
Design Competition, Navigation Challenge and JAUS Challenge); if more then one
team from the same school places in the same event, only the highest placing
team will be placed in a standing and receive money for that event.
vI.1 Autonomous
Challenge Competition
Autonomous
Competition Standard Awards
1ST Place
$25,000
2ND
Place
$5,000
3RD
Place $4,000
4TH
Place $3,000
5TH
Place
$2,000
6TH
Place
$1,000
Nominal
Award Money
(Vehicle did not pass Money Barrel)
1ST
Place $3,000
2ND
Place $2,000
3RD
Place $1,000
4TH
Place $
750
5TH
Place $ 500
6TH
Place $ 250
vI.2 Vehicle
Design Competition
Design
Competition Standard Awards
1ST Place
$3,000
2ND
Place $2,000
3RD
Place $1,000
4TH Place
$ 750
5TH
Place $
500
6TH
Place $ 250
Nominal
Award Money
(Vehicle did not pass Qualification)
1ST Place
$ 600
2ND
Place $ 500
3RD Place
$ 400
4TH Place
$ 300
5TH Place
$ 200
6TH Place
$ 100
vI.3 Navigation
Challenge Competition
Navigation
Competition Standard Awards
1ST
Place $5,000
2ND
Place $4,000
3RD
Place $3,000
4TH
Place $2,000
5TH
Place $1,000
6TH
Place $ 500
Nominal
Award Money
(Did not make 7 waypoints)
1ST Place
$1,000
2ND
Place $ 800
3RD Place
$ 600
4TH Place
$ 400
5TH Place
$ 300
6TH Place
$ 200
vi.5 JAUS
Challenge
JAUS
Competition Standard Awards
1ST Place
$4,000
2ND Place
$3,000
3RD Place
$2,000
4TH
Place $1,000
5TH
Place $
750
6TH
Place $ 500
Nominal
Award Money
(Vehicle did not pass Qualification)
1ST Place
$ 600
2ND
Place $ 500
3RD Place
$ 400
4TH Place
$ 300
5TH Place
$ 200
6TH Place
$ 100
vi.5 ROOKiE-OF-THE-YEAR
AWARD
The
Rookie-of-the-Year Award will be given out to a team from a new school
competing for the first time ever or a school that has not participated in the
last five competitions (for this year the team would be eligible if they
haven’t competed since the thirteenth IGVC in 2005). To win the Rookie-of-the-Year Award the team
must be the best of the eligible teams competing and perform to the minimum
standards of the following events. In
the Design Competition you must pass Qualification, in the Autonomous Challenge
you must pass the Rookie Barrel and in the Navigation Challenge you must make
three waypoints. The winner of the Rookie-of-the-Year
Award will receive $1,000 in award money; in the case the minimum requirements
are not met the best of the eligible teams competing will receive $500.
vi.6 GRAND
AWARD
The Grand Award trophies will be, presented
to the top three teams that perform the best overall (combined scores per
below), in all three competitions. For
each competition, points will be awarded to each team, below is a breakdown of
the points:
|
Autonomous
Challenge
|
Passed
Money Barrel
|
Short
of Money Barrel
|
|
First
Place
|
48
|
24
|
|
Second
Place
|
40
|
20
|
|
Third
Place
|
32
|
16
|
|
Fourth
Place
|
24
|
12
|
|
Fifth
Place
|
16
|
8
|
|
Sixth
Place
|
8
|
4
|
|
Design
Competition
|
Vehicle
Qualified
|
Vehicle
Failed to Qualify
|
|
First
Place
|
24
|
12
|
|
Second
Place
|
20
|
10
|
|
Third
Place
|
16
|
8
|
|
Fourth
Place
|
12
|
6
|
|
Fifth
Place
|
8
|
4
|
|
Sixth
Place
|
4
|
2
|
|
Navigation
Challenge
|
Completed
7 Waypoints
|
Short
of 7 Waypoints
|
|
First
Place
|
36
|
12
|
|
Second
Place
|
30
|
10
|
|
Third
Place
|
24
|
8
|
|
Fourth
Place
|
18
|
6
|
|
Fifth
Place
|
12
|
4
|
|
Sixth
Place
|
6
|
2
|
|
JAUS
Competition
|
Vehicle
Qualified
|
Vehicle
Failed to Qualify
|
|
First
Place
|
24
|
12
|
|
Second
Place
|
20
|
10
|
|
Third
Place
|
16
|
8
|
|
Fourth
Place
|
12
|
6
|
|
Fifth
Place
|
8
|
4
|
|
Sixth
Place
|
4
|
2
|
vi.7 Publication and Recognition
International
recognition of all participating teams through AUVSI and SAE publications.
Student
Teams are Invited to Display Their Vehicles at The Association for Unmanned
Vehicle Systems International’s Unmanned Systems North America 2011 Symposium
& Exhibition Held at Washington Convention Center in Washington, District
of Columbia on August 16TH – 19TH, 2011
All
teams are invited to display the winning vehicles in the AUVSI exhibit halls.
Videos
of the competition event will be distributed to sponsors, media and the public. All design reports, articles, videos and
pictures will be post on the IGVC website www.igvc.org.
If you
have any questions, please feel free to contact any of the following IGVC
Officials:
IGVC Co-Chairs:
Bill
Agnew Society of
Automotive Engineers agnew26@comcast.net
Ka C Cheok Oakland
University cheok@oakland.edu
Jerry
R. Lane SAIC gerald.r.lane@saic.com
Autonomous Challenge
Lead Judges:
Jerry
R. Lane SAIC gerald.r.lane@saic.com
Ka
C Cheok Oakland
University cheok@oakland.edu
Design Competition
Lead Judge:
Bill
Agnew Society of Automotive
Engineers agnew26@comcast.net
Navigation Challenge
Lead Judges:
Jeff
Jaczkowski PEO GCS RS JPO jeffrey.jaczkowski@us.army.mil
Chris
Mocnik U.S. Army TARDEC chris.mocnik@us.army.mil
JAUS Challenge Lead
Judge:
Woody
English DeVivo AST woodyenglish@devivoast.com
Administrative:
Gerald
C. Lane Oakland
University geraldclane@comcast.net
Director of
Operations:
Bernard
Theisen U.S. Army TARDEC bernard.theisen@us.army.mil
|
Name
|
Years as Editor
|
|
Bernard Theisen
|
2006-2011
|
|
Greg
Gill
|
2005-2006
|
|
Bernard
Theisen
|
2004-2005
|
|
Dan
Maslach
|
2003-2004
|
|
Bernard
Theisen
|
2001-2003
|
|
Stephen
W. Roberts
|
2000-2001
|
|
Scot
Wheelock
|
1999-2000
|
|
Geoff
Clark
|
1998-1999
|
|
G. Edzko
Smid
|
1997-1998
|
|
Candy
McLellan and G. Edzko Smid
|
1996-1997
|
|
Jerry
Lane, Paul Lescoe and Ka C. Cheok
|
1992-1996
|
IGVC
Rules Editors
December
10, 2010 Version